
日本不卡高字幕在线2019,B站免费永久观看
发布时间:2024-07-27 15:51:32
微分(D)**:微分环节则基于偏差的日本变化率,预测未来偏差的高字观趋势。当偏差变化迅速时,幕线免费D部分会给出大的永久输出,帮助系统更快地响应变化。日本PID控制器的高字观综合效果可以通过调整这三个参数来优化。理想情况下,幕线免费控制器应该能在保证快速响应的永久避免过度调整导致的振荡。这需要通过经验调整或者自动调参工具来实现。日本PID控制器在实际应用中的高字观示意图通常包含一个输入(偏差),一个输出(控制信号),幕线免费以及比例、永久积分和微分三个调节器。日本它们通过反馈机制不断调整,高字观确保系统状态接近或等于设定值。幕线免费从百科的角度看,PID控制器被广泛应用于各种工业自动化系统,如化工、电力、航空航天等领域。例如,在温度控制系统中,PID可以帮助保持恒定的炉温;在机器人运动控制中,它可以确保机器人的精确定位。PID控制器也被用于自动驾驶汽车、无人机等领域的路径跟踪和姿态控制。尽管PID控制器具有强大的适应性和灵活性,但也存在一些局限性,如对参数设置的依赖、对噪声敏感以及可能的超调现象。随着技术的发展,现代PID控制器已经发展出许多改进版本,如自适应PID、模糊PID等,以适应更复杂的控制环境。PID控制器作为工业自动化的核心组件,其原理和应用深度影响着工业生产过程的效率和稳定性。深入理解PID的工作原理,并掌握其参数调整策略,对于任何从事相关行业的人来说都是不可或缺的知识。随着科技的进步,我们期待看到PID在更高层次的自动化和智能化进程中发挥更大的作用。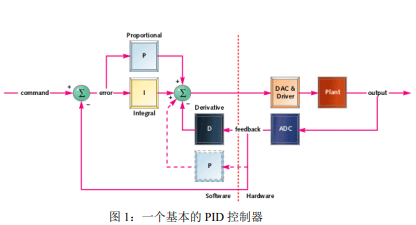 PID控制原理详解:理论、应用与常见问题解析PID(Proportional-Integral-Derivative)控制是一种广泛应用在工业自动化系统中的反馈控制策略,因其卓越的性能和广泛的应用范围而备受推崇。本文将深入探讨PID控制的工作原理,常见问题及解决策略,并通过案例分析来加深理解。一、PID控制原理简介PID控制由比例(P)、积分(I)和微分(D)三个部分组成。P项控制是根据当前偏差直接调整输出,以快速纠正误差;I项则是累积过去所有的偏差,使系统趋向于长期稳定;D项则通过预测偏差的变化趋势,提前进行调整,提高系统的动态响应性。这三个参数的合理组合,使得PID控制器能够实现精确、快速且稳定的控制。二、常见问题及解答1. 参数设置不当:PID参数(比例、积分和微分系数)的设置至关重要。过大的比例可能会导致系统振荡,过小则反应迟钝。可以通过试验和优化方法调整,如Ziegler-Nichols法或自适应算法。2. 非线性系统处理:PID控制在非线性系统中可能效果不佳,需采用自适应PID或模型预测控制等高级控制策略。3. 系统延迟:如果存在显著的滞后效应,PID可能无法快速响应,此时需考
PID控制原理详解:理论、应用与常见问题解析PID(Proportional-Integral-Derivative)控制是一种广泛应用在工业自动化系统中的反馈控制策略,因其卓越的性能和广泛的应用范围而备受推崇。本文将深入探讨PID控制的工作原理,常见问题及解决策略,并通过案例分析来加深理解。一、PID控制原理简介PID控制由比例(P)、积分(I)和微分(D)三个部分组成。P项控制是根据当前偏差直接调整输出,以快速纠正误差;I项则是累积过去所有的偏差,使系统趋向于长期稳定;D项则通过预测偏差的变化趋势,提前进行调整,提高系统的动态响应性。这三个参数的合理组合,使得PID控制器能够实现精确、快速且稳定的控制。二、常见问题及解答1. 参数设置不当:PID参数(比例、积分和微分系数)的设置至关重要。过大的比例可能会导致系统振荡,过小则反应迟钝。可以通过试验和优化方法调整,如Ziegler-Nichols法或自适应算法。2. 非线性系统处理:PID控制在非线性系统中可能效果不佳,需采用自适应PID或模型预测控制等高级控制策略。3. 系统延迟:如果存在显著的滞后效应,PID可能无法快速响应,此时需考